|
Applications:



 The mobile agent technology can significantly enhance the design
and analysis of problem domains under the following three circumstances.
(1) the problem domain is geographically distributed;
(2) the subsystems exist in a dynamic environment; (3)
the subsystems need to interact with each other more flexibly.
The mobile agent technology can significantly enhance the design
and analysis of problem domains under the following three circumstances.
(1) the problem domain is geographically distributed;
(2) the subsystems exist in a dynamic environment; (3)
the subsystems need to interact with each other more flexibly.
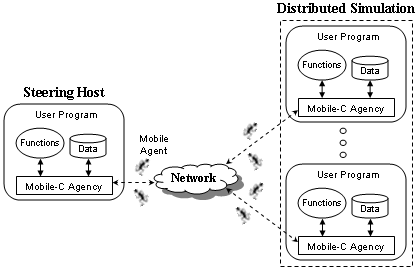
Mobile agents can travel between different execution environments. Mobile agents can be created dynamically at runtime and dispatched to source systems to perform tasks with the most updated code. Therefore, the mobility of mobile agents provides distributed applications with significant flexibility and adaptability in dynamically changing environments. Mobile-C is a general mobile agent platform, it can find its applications in many areas, especially in networked intelligent mechatronic and embedded systems. For example, when dealing with terra mining or planet exploration where multiple mobile units are required to setup equipment or explore the environment, the mobile units are far from the control center and communication is delayed or nonexistent. Intelligent autonomous agent-based systems can collaborate in order to overcome obstacles without the need for continued supervision from the control center. As another example, the ability to travel allows mobile agent systems to move computation to source systems. This decentralized approach improves network efficiency since the processing is performed locally.
To add your application on this page,
please send a brief description of your project and web site
to




Distributed Multi-Camera Surveillance for Intelligent Home
This project foresees the enlargement of an existing single-source
surveillance system, developed at our lab, to a distributed
multi-camera video network. Currently, the single-camera video
system is applied for fall detection in the so-called Video-Based
Intelligent Home (ViBIH). The main goal is thus to improve the
accuracy of the fall detection results and, at the same time,
enhance the vision field. Since we envision to use smart cameras,
where the primary image processing is performed close to the image
sensor, the main challenges faced by this project are: (i) the
video sensor units' connectivity, and (ii) the communication
network. As mentioned above, (i) comprises the process
synchronization and the cooperative integration of the multiple
video productions. It requires thus the definition of an
appropriate data structure, the development of the target
algorithms for merging and processing of the correlated info
coming from different video sources, as well as the
prioritization of related tasks. On the other hand, (ii)
includes the definition of the communication protocol and the
memory management policy.
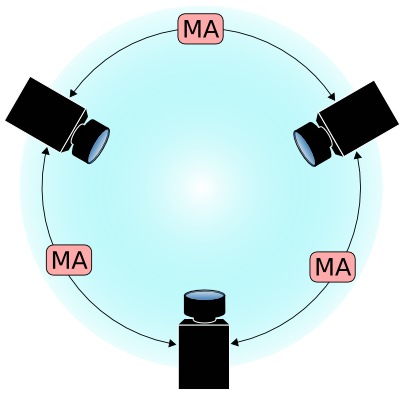
In this project, Mobile-C is used in a multi-camera platform to
decentralize some of detection algorithms. For example, a human tracking algorithm will move from one smart camera to the other when the target move to the field of
vision of another camera. The algorithm is deployed in a mobile agent in Mobile-C.
Monitoring Intrusion detection on MANET using intelligent agent
In recent years, the security issues on MANET have become one of
the primary concerns. The MANET is more vulnerable to attacks
than wired network. These vulnerabilities are nature of the MANET
structure that cannot be removed. As a result, attacks with
malicious intent have been and will be devised to exploit these
vulnerabilities and to cripple the MANET operation. Mobile agent
can be used as tool to collect and process information regarding
intrusion data into MANET's nodes. The characteristic of the
mobile agent should be light as many limitation on these nodes.
http://www.utm.my/
Mesh Router Management with Mobile-Agent in Wireless Mesh Networks
A mobile agent moves, and collects the information about the settings in each router. When it comes back to the mobile agent server it reports the results to the server. After that, the server verifies whether there exists fault or not.
http://www.postech.ac.kr
Distributed SCADA system
This research focuses on the development of a distributed SCADA system
based on mobile C. Future endevours may include an extension to a
distributed vehicle control system.
http://www.kim.lipi.go.id
Distributed Real-time Embedded Computing
This project aims to develop a Distributed Real-time Embedded Computing
platform for control and automation that is fault-tolerant and
performance adaptive.
http://qut.com
An Urban Traffic Signal Control Systems
Based on Mobile Multi-Agent Technology
This projects aims to realize the conversion from traffic control
algorithms to traffic control agents and validate the control
effects of these agents through simulation.
It also studies the coordination method of control agents.
Control agent communicates and negotiates with the adjacent
intersections' control agents.
Afterwards, it adjusts its control behaviors and parameters through
fuzzy reasoning based on predefined rules and the control
optimization of the whole area is realized.
The running mechanism and switched rules of traffic control agent
are studied.
The system's structure is divided into three levels: center
organization level, area coordination level and field execution
level using the hierarchical architecture developed for intelligent
control systems.
http://www.compsys.ia.ac.cn
Using Adaptable Mobile Agents to Add QoS in Wireless Sensor Networks
Wireless sensor networks (WSN) are increasingly being used for critical
safety monitoring systems.
In these systems, the reliability level for the data is of paramount
importance especially when emergency situations occur and may involve
material and life losses.
Therefore, it is important that every incident can be tracked down
throughout the event.
Clearly, the information flow from the sensors, in these environments,
should continuously feed a monitoring system throughout the incident.
Moreover, monitoring all phases of the incident can be used for further
investigation and future prevention by revealing the source of the
problem.
It also helps the rescue team in the action management and in the
decision-making.
Typical video monitoring systems do not have all these features,
due to the lack of sensing feedback of what is happening in the
physical environment.
Thus, there is no way to know exactly where, why and how some fire
emergency happened.
In our solution, we use the integration of WSN and Radio Frequency
ID tags (RFIDs) to provide accurate localization reference and
other relevant contexts on the emergency on course.
Data from sensors and RFID tags at the location of the incident are
submitted to a fusion process to eliminate redundant data and
noise and so saving energy for the whole network.
The usage of mobile agents eliminates the need for all sensors to
send their readings back to a sink whenever some problem occurs.
In our solution the mobile agent, held by the sensors, and tailored
according to application needs (lowest latency, highest delivery
rate etc) is responsible for migrating, collecting the data and
performing data fusion at each step.
The novelty of our solution is the agents flexibility to
behavior and structure changes to guarantee the required quality
of service by the application when data is gathered and delivered
in harsh conditions.
http://www.ufscar.br
An Intelligent System Based on Cooperating Embedded Systems and
Wireless Sensors
The objective of this work is to develop a wireless sensors network:
http://www.eseco.fr
Darkwolf
Project codename darkwolf is a very large multistage and
multibranch project.
It is run as a Yamika core project (largest classification
for any company project).
We will use this software along with software from over
350 other software vendors in combonation for a large
scale launch of state of the art software and websites
(projects range from small html chatrooms to apple inc.
grade technologies and intel grade technologies already
designed and are now in progress).
We hope everything goes as planned and we have many sub vendors
lined up under vendors so odds of failure are at extremely
low probability even in spite of the project scale.
Networked Robotics
First stage of this project is to build a mobile robotic sensored
vehicle, capable of being controlled wirelessly, and via the agent
protocol, give status of the vehicle, as well as, serving, as
logging all movements, back to the agent server controller.
Next stage requires multiple vehicles to communicate with
each other, via agent protocols, and based on a given
algorithm, divide and conquer tasks in order to accomplish a
set goal (ie, such as best way to traverse a given course).
http://www.austincc.edu
MobiRouting
Securing communications for mobile
ad-hoc networks require secure routing techniques.
Our projects MobiRouting implement a adaptive routing
algorithm for mobile networks.
http://www.univmed.fr
Intelligent Optical Network Management with Mobile Agent
Compared with traditional one ,this optical network management system
is more flexible and decentralised with mobile agent used.
Mobile agent will be used for fault monitoring, node configuration and
QoS.
http://www.bupt.edu.cn
E-Auction
This project foresees the enlargement of an existing single-source
surveillance system, developed at our lab, to a distributed
multi-camera video network.
Currently, the single-camera video system is applied for fall
detection in the so-called Video-Based Intelligent Home (ViBIH).
The main goal is thus to improve the accuracy of the fall detection
results and, at the same time, enhance the vision field.
Since we envision to use smart cameras, where the primary image
processing is performed close to the image sensor, the main
challenges faced by this project are: (i) the video sensor
units' connectivity, and (ii) the communication network.
As mentioned above, (i) comprises the process synchronization and
the cooperative integration of the multiple video productions.
It requires thus the definition of an appropriate data structure,
the development of the target algorithms for merging and
processing of the correlated info coming from different video sources,
as well as the prioritization of related tasks.
On the other hand, (ii) includes the definition of the communication
protocol and the memory management policy.
http://egyptnetwork.com
Intelligent Video Sensor Network - InViNe
In this project innovative concepts for in-network processing and
system autonomy for a fast-deployable, self-configuring and
self managing Intelligent Video Sensor Network (InViNe) will be
researched and developed taking into consideration the resource
constraints, variable network capacity and dynamic topology
found in ad-hoc wireless mesh networks.
The enabler of the InViNe system will be an embedded middleware
supporting the interaction between distributed network and sensor
devices by providing an interface between the operating system
on the embedded device and a wide variety of video sensor network
applications.
In order to facilitate distributed sensor data processing, the concept
of mobile software agents will be used.
Mobile agent-based systems allow the execution of certain software
components called agents to migrate across a network.
Mobile agent oriented middleware has many advantages over typical
clientserver communication such as reduced network load, greater
ability to adapt to a dynamic network and support for autonomous
execution.
Video analysis and system management tasks will be mapped to mobile
agents and these agents will dynamically migrate through the
network from video sensors to network nodes in order to optimally
utilize the available network capacity and in-network processing
resources.
Low-level processing tasks can be done directly on the resource limited
sensors thereby limiting the amount of data which must be transported
into the network.
High-level or collaborative processing tasks can migrate to network
nodes with higher processing capabilities.
The location of agents will be continuously optimized adapting to
network topology changes due to node mobility as well as nodes
entering and leaving the network.
http://www.hslu.ch/iimsn
Mobile-Agent-Based Autonomous Data Fusion for Distributed Sensors
This project develops a decentralized autonomous data fusion (ADaF) system that fuses the data from geographically-dispersed heterogeneous sensors into an integrated ISR information system.
http://www.cs.wright.edu/ee/
Agent-Based Mobile Robot
The objective of this proyect is build
a mobile robot for exploration. The intelligence for the
robot is agent-based with several agents in charge of the
sensors, motors, mapping and planning.
http://www.ucv.cl
Multi Agent Systems and Information Systems
This research focuses on the development of a distributed decision support systems and using software agent technology to support organizations characterized by physically distributed, enterprise-wide, heterogeneous information systems.
http://www.uvvg.ro
TIPS: Transparent IP Sockets
TIPS (Transparent IP Sockets) is a wrapping implementation of specific functions of the BSD sockets API to provide support for transparent IP mobility at the application level. Implemented on top of the transport layer it allows UDP and TCP communications to be immune to both client and server terminal migration (single and double jump). Location independent identification, and lossless data transmissions are provided with reduced overhead. The use of a Distributed Hash Table for keeping terminal location information also allows for scalable operation.
http://www.usp.br
Ambient Intelligence: a solution embedded and adaptive computing
The aim of this project is to develop a Management Systems Intelligent Environments, called to SiGAmI, whose main characteristic is the context-aware and dynamic adaptation of the environment transparently to your users. For this, we intend to use the technologies of Multi-Agent Systems and Embedded Systems, in other words, to embed intelligent agents in an FPGA to realize the control and configuration of computing devices and electronic integrated and incorporated into the environment.
http://www.uern.br
Research and Development
Design and development of a SCADA/smart-grid testbed. developing a Multi-agent System using C/C++ libraries supporting IEEE FIPA.
http://www.kush.com.fj
Model of a mobile agent system for network administration
The goal of the project is to develop a simple working model of mobile agents able to transverse through the network and help administrate it. The basic functionality of agents would include mobility, data collection and minor administration tasks.
http://www.fer.hr/en
An agent-controlled system
Self-Healing Power Distribution Systems
On each switch, an agent is installed to communicate with
other agents in order to re-route the network during an occurrance of a fault.
The final goal is to implement the agent inside an embedded system that
are installed in each switch on the power distribution systems.
http://140.124.201.144
Intrusion Detection using Mobile Agents
We perform Intrusion Detection using misuse and anomaly detection subsystems. We need Mobile agents to deploy the Anomaly Detection System, in a distributed environment.
are installed in each switch on the power distribution systems.
http://www.mitindia.edu/
Mobile Agents in network Management
The Focus of the project is how to use mobile agents for network management and study the resultant behaviour.
http://www.iat.co.ke
MAS for Data Center Energy Management
Project Description: Agent based system for the management of energy in a Data Center. This intelligent system decides when to shutdown the nodes of a cluster to avoid damages on devices.
http://ephyslab.uvigo.se
Agents to Manage Memory
Two agents will monitor the memory usage in a PC, when the memory usage become too high, the agents will try to fix it by smartly closing processes.
www.ufam.edu.br
RTS AI Development
Generateing a multi agent environment for research of artificial itelligence in RTS veideo games.
http://itesm.mx
Using Mobile-C to program a multi agent system
Tasks for multiagent enviroment using Artifical Intelligence
Create two agents and communicate themselves to do a task that verify the memory consumption of a notebook
Mobile Agents for Computer Intrusion Detection
In the age of the Internet, computer intrusion
detections are at best a black art. The science to perceive,
track, and understand intrusions is still at its infancy.
Many different technologies and topologies are under
investigation to see which model provides adequate data
for intrusion detection. In this paper, we present a
platform independent Java-based mobile agent intrusion
detection system (IDS). In our prototype mobile agent
IDS, the focus is on port scanning and file integrity
checking. The mobile agents are implemented using the
Concordia Mobile Agent Development Kit. We will
discuss the performance and memory resources required
to run these mobile agents.
http://www.sevnhills-inc.com
Mobile agent in DIS system
Optimisation of WSN using mobile agent
Use mobile agent to reduce dessipation of energy in WSN. that's why I need a C++ platfom
http://www.univ-valenciennes.fr//
Study of the dynamics of the networks of sensors by the mobile agents
The objective of this subject is to justify the use of the mobile agents as a
paradigm and a technology for the networks of sensor while being based on their
distinctive devices able to treat effectively and decisively the dynamism of
network and the constraints of resource. Required work is to integrate the
mobile agents in simulator of Network NS2 for zigbee ( the norme 802.15.4) .
NEtwork Monitoring Infrastructure
Develop a new system for the monitoring of an stock exchange infrastructure.
http://www.deutsche-borse.com
VESTA
A project aimed at developing Domotics applications including security,
power plant administration, handicap support for the inhabitants.
http://www.mfn.unipmn.it
Virtual Guide for Students with Autism
Providing a remote guide who can allow students with autism to become familiar
with new environments such as the University, hospitals etc from a safe and
familiar environment, such as their own home. The idea is that a volunteer
will navigate the areas with which the client needs to become familiar, with a
camera, microphone etc. The client sits at home and can communicate with the
volunteer, people that tthey will meet etc. Agents monitor both the volunteer
to show location etc, and the client to indicate whether they are becoming
stressed.
http://www.shu.ac.uk
Monitoring QoS on Telematic Devices
In order to preempt potential failure points we like to run an agent on each
device to monitor various data points and report back when they near their
constraint parameters.
http://www.trimble.com
INTEGRA - Integrated Agricultural System for sustainable farming system
Traditional methods of farming and agriculture undergoes consistent change as
computational technology plays vital role in precision agriculture. The by-gone
methods of farming which involves time, space and cost, has been consistently
improved by various agricultural practices out of which precision agriculture
is currently on the up-surge.
INTEGRA (INTEgrated GRid framework for Agriculture ) discusses on methods to built an effective farming system using wireless sensor networks built in miniature Macronode. The system works on multiple crop growth concerned parameters from seed to crop leading to utilization of available optimal farming resources such that beneficial yeild can be achieved. INTEGRA architecture works on multiple facets of computing techniques such as Data Gathering methods, Data Aggregation, Mining Algorithms, and Event monitoring, generation methods in order to achieve the expected output. INTEGRA has been designed and implemented for two types of varying essential crops. The system adapts to differing climatic needs and resources required to develop the crop. http://sites.google.com/site/integratedagricultureportal/
LMI
The LMI project is intended to explore the possibilities of contract based load response for power system operation and focuses on domestic and commercial demand as responsible loads.
The project follows some previous experiences of microgrid control by multi-agent systems as those shown at Joseba Jimeno, Jon Anduaga, José Oyarzabal and Asier Gil De Muro, "Architecture of a microgrid energy management system", Published online 26 April 2010 in Wiley Online Library (wileyonlinelibrary.com). DOI: 10.1002/etep.443 The LMI project is at its early stages but the agent platform could evolve from JADE to Mobile-C because of the difference in hardware requirements and suitability for embedded enviroments. http://www.tecnalia.com/ |
| Integration Engineering Laboratory | UCD MTU Sandia |